
1. Ҷавоби хулосаи иҷроия
Талаботи асосӣ барои асбоби метеорологии насбшуда дар ҳавопаймои бесарнишин тарҳи ултрасабук (камтар аз 60 г) ва сохтори муттаҳидшуда бидуни қисмҳои ҳаракаткунандаро барои таъмини устувории аэродинамикӣ ва устуворӣ дар бар мегиранд. Сенсорҳои беҳтарин бояд муқовимати баландро ба дахолати электромагнитӣ таъмин кунанд ва протоколҳои стандартиро ба монанди Modbus RTU барои ҳамгироии бефосилаи идоракунии парвоз дастгирӣ кунанд. Ин меъмории техникӣ имкон медиҳад, ки панҷ унсури асосии муҳити зист - суръати шамол, самт, ҳарорат, намӣ ва фишор - бидуни халалдор кардани устувории парвози платформаҳои муосири бесарнишин дар вақти воқеӣ назорат карда шаванд.
2. Муқаддима: Нақши муҳими метеорологияи вақти воқеӣ дар амалиёти дронҳо
Дар ҷаҳони пурхатари амалиётҳои дастгоҳҳои ҳавопаймоии бесарнишин (UAV), маълумоти метеорологӣ дар вақти воқеӣ фарқи байни як миссияи муваффақ ва талафоти фоҷиабори кадр мебошад. Андозагирии суръати шамол, самт, ҳарорат, намӣ ва фишори атмосфера ҳангоми парвоз дигар як "иловагии" ихтиёрӣ нест - он як талаботи асосӣ барои устувории парвоз, беҳсозии батарея ва дақиқии бор мебошад.
Дар Honde Technology, мо роҳҳои ҳалли сенсории худро барои бартараф кардани монеаҳои асосии сахтафзори насбшуда ба дронҳо тарҳрезӣ кардем: ҷаримаҳои вазн, муқовимати баланди шамол ва вайроншавии сигнал. Бо бартараф кардани ҷузъҳои механикӣ ба ҷои тарҳи муттаҳид ва сахти ҳолати, мо мушкилоти мушаххаси дахолати баланди электромагнитӣ (EMI)-ро, ки хоси муҳаррики DC-и бечӯтка (BLDC) мебошад, ҳал мекунем ва стандарти навро барои маълумоти экологӣ, ки барои парвоз омодаанд, муқаррар менамоем.
3. Параметрҳои асосӣ: Чаро "сабук" ва "хурд" қобили музокира нестанд
Барои муҳандисони системаҳои ҳавопаймоҳои бесарнишин, ҳар грамме, ки ба корпуси ҳавопаймо илова карда мешавад, андози мустақим барои истодагарии парвоз ва қобилияти маневркунӣ мебошад. Аз нигоҳи таърихӣ, муттаҳид кардани маҷмӯи пурраи метеорологӣ аксар вақт ба синфи калонтар ва гаронтар гузаштанро талаб мекард. Асбоби обуҳавосанҷии ҳавопаймоҳои бесарнишин Honde ин мувозинатро халалдор мекунад. Бо диаметри ҳамагӣ 50 мм ва вазни умумии 55-56 г, он ҳамчун яке аз сабуктарин ва хурдтарин асбобҳо дар бозори ҷаҳонӣ эътироф шудааст.
Афзалиятҳои асосии ҳамгироии идоракунии парвозҳои UAV:
- Истеъмоли ками энергия:Бо истифода аз чипи камқуввати дохилӣ, сенсор дар диапазони 5-12 В танҳо 10 мА ҷараён истеъмол мекунад ва захираҳои тахтаи тақсимоти қувва (PDB)-и ҳавопайморо нигоҳ медорад.
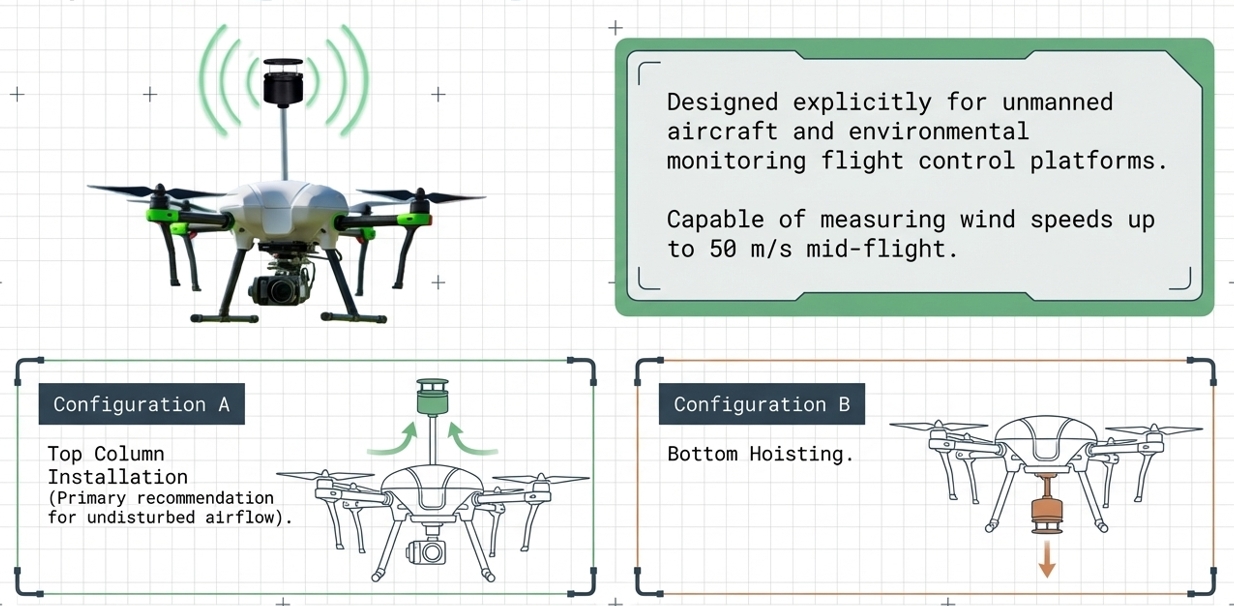
- Сохтори ултрасадои се-зонди муттаҳидшуда:Тавре ки дар тарҳи махсуси мо дида мешавад, меъмории ултрасадои сезондӣ қисмҳои ҳаракаткунандаро хориҷ мекунад ва кафолат медиҳад, ки дастгоҳ аз ларзишҳои басомади баланди парвоз эмин аст.
- Муқовимати EMI:Махсусан барои нигоҳ доштани якпорчагии маълумот, сарфи назар аз садои назарраси электромагнитӣ, ки аз ҷониби муҳаррикҳои дронҳои баландсифат ва телеметрияи радио ба вуҷуд меоянд, тарҳрезӣ шудааст.
- Устувории экологӣ:Корпуси обногузар ва чангногузар бо рейтинги IP дорои коркарди махсуси гармидиҳӣ дар рӯйпӯши муҳофизатӣ мебошад, ки кори доимиро дар ҳарорати шадид ва борони сабук таъмин мекунад.
4. Мушаххасоти техникии муқоисавӣ
Параметрҳои зерин қобилияти панҷунсии асбоби Honde-ро нишон медиҳанд, ки барои зуд фурӯ бурдани маълумот тавассути мантиқи идоракунии парвоз ва системаҳои назоратии зеҳни сунъӣ сохта шудаанд.
| Номи параметр | Диапазони ченкунӣ | Дақиқӣ | Қарор | Воҳид |
| Суръати шамол | 0~50м/с | ±0.5м/с (@10м/с) | 0.01 | Бону |
| Самти шамол | 0-359° | ±5° (@10м/с) | 0.1 | ° |
| Ҳарорат | -20-85℃ | ±0.3℃ (@25℃) | 0.01 | ℃ |
| Намӣ | 0-100%RH | ±3%RH (<80%RH) | 0.01 | %RH |
| Фишори ҳаво | 500-1100hPa | ±0.5 соатПа | 0.1 | hPa |
| Шиддати вуруд | 5-12В | — | — | VDC |
| ҷорӣ | 10 мА | — | — | mA |
5. Ҳамгироӣ ва коммуникатсия: Истифодаи Modbus RTU барои парвози интеллектуалӣ
Ҳамгироӣ барои муҳандиси муосири UAV ба интерфейси рақамии RS485 ва чандирии протоколҳои Modbus RTU ва ASCII такя мекунад.
Омӯзиши амиқи техникӣ: Харитасозии регистрҳо ва формулаҳоБарои табдил додани баромади сенсори шонздаҳӣ ба маълумоти парвози амалӣ, таҳиягарон бояд омилҳои дурусти миқёспазириро истифода баранд. Аз рӯи таҷрибаи ман, регистри ҳарорати ҳаво барои харитасозии дуруст муҳимтарин аст:
- 0×0009: Ҳарорати ҳаво
- Формула:
Натиҷа = (Шонздаҳӣ / 100) - 40 - Мисол:0x1B00 (6912) ба 29.12℃ ҳисоб мекунад.
- Формула:
- 0x000A: Намӣ дар ҳаво
- Формула:
Натиҷа = Шашкунҷа / 100(масалан, 0×1603 = 56.35%RH).
- Формула:
- 0x000B: Фишори атмосфера
- Формула:
Натиҷа = Шашкунҷа / 10(масалан, 0×2784 = 1011.6hPa).
- Формула:
- 0x000C: Суръати шамол
- Формула:
Натиҷа = Шашкунҷа / 100(масалан, 0×0125 = 2.93м/с).
- Формула:
- 0x000D: Самти шамол
- Формула:
Натиҷа = Шашкунҷа / 10(масалан, 0x0C14 = 309.2°).
- Формула:
Танзимоти пешрафта: Компаси электронӣБарои ҳавопаймоҳои бесарнишин, ки дар онҳо сенсор метавонад бо самти воқеии шимолии дрон аз ҷиҳати ҷисмонӣ мувофиқ набошад, сенсор ихтиёрӣ аст.Компаси электронӣ (0×0020)Ин ба система имкон медиҳад, ки самти самтро нисбат ба самти шимоли фармоишӣ, ки барои танзими динамикии масири парвоз муҳим аст, барорад.
Имконоти васлкунӣ
- Насби амудии болоӣ дар сутун:Барои намунагирии ҳавои тоза дар болои шустани пропеллер тавсия дода мешавад (бо истифода аз сутуни амудӣ, ки дар тасвирҳои техникии мо нишон дода шудааст).
- Бардоштани поёнӣ:Барои платформаҳои вазнинбардорӣ, ки дар он сенсор ҳамчун зонди муҳити пайвастшуда ё зери қафо амал мекунад, беҳтарин аст.
6. Беҳтарин таҷрибаҳои муҳандисӣ: Пешгирӣ аз домҳои маъмулӣ
Дар таҷрибаи ман дар танзими ин стекҳои парвоз барои муштариёни саноатии B2B, чанд тафсилоти нозуки протокол метавонанд эътимоднокии системаро афзоиш ё коҳиш диҳанд:
- Ба давраи дархости 1S эҳтиром гузоред:Коркарди дохилӣ барои устувор кардани панҷ нуқтаи додаҳо вақтро талаб мекунад. Мо муайян кардем, ки сарфи назар кардани давраи дархости ҳадди ақали 1S/вақт дар нармафзори хостинги шумо боиси ноустувории ҷараёнҳои додаҳо ва аз ҳад зиёд пур шудани буфер мегардад.
- Коркарди хатогиҳои хомӯш:Ин як маслиҳати муҳими "дохилӣ" аст: сенсоррамзи хатогиро барнамегардонадбарои хатогиҳо ё фармонҳои хатои санҷиши CRC16. Агар системаи шумо дар давоми ... посух нагирад200мс, шумо бояд драйвери худро барои фиристодани автоматии фармон барномарезӣ кунед.
- Санҷишҳои марзӣ:Боварӣ ҳосил кунед, ки фармонҳои пурсиши шумо суроғаҳои регистрҳоро берун аз диапазони муайяншуда талаб намекунанд. Агар барои регистрҳои мавҷуда дархост карда шавад, баромади сенсор пешгӯинашаванда мегардад.
7. Хулоса ва даъвати тиҷоратӣ ба амал
ХондеАсбоби обу ҳавои насбшуда бо истифода аз UAVмаҷмӯи ҳамаҷонибаи метеорологии панҷ унсурро дар як бастаи ягонаи 56г пешниҳод мекунад. Бо беҳбуд бахшидан ба қувваи кам ва муқовимати баланди EMI, он маълумоти "ҳақиқати заминӣ"-ро, ки барои амалиёти дақиқи дронҳо зарур аст, бидуни ҷаримаҳои аэродинамикӣ ё вазни таҷҳизоти кӯҳна таъмин мекунад.


- Барои лоиҳаи мониторинги экологӣ нархномаи фармоишӣ дархост кунед.
Номи ширкат:Ширкати технологии HondeВебсайт: www.hondetechco.com Почтаи электронӣ: info@hondetech.com
Вақти нашр: 08 апрели соли 2026